基于概率BCI与自适应控制的高精度脑机协作研究
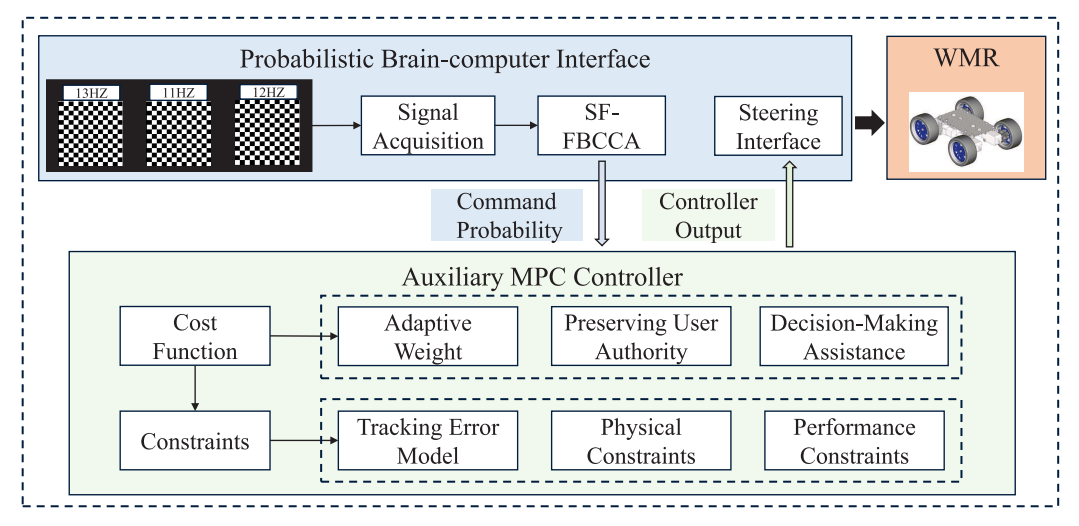
西北工业大学(Northwestern Polytechnical University)自动化学院的余孝军团队采用念通智能 iRecorder W32 无线脑电放大器作为该研究的核心信号采集平台,团队针对传统非侵入式BCI系统仍面临脑电信号解码精度有限,以及控制效率与稳定性不足等问题,提出一种融合概率脑机接口(Probabilistic BCI)与模型预测控制(Model Predictive Control, MPC)的脑控框架,并将其应用于轮式移动机器人(WMR)实时控制,以提升复杂环境下的控制精度与系统鲁棒性。
01
实验方法
该研究提出了一种结合概率脑机接口与“模型预测控制(MPC)”的新型框架,在信号采集环节iRecoder W32支持多通道无线脑电记录,能够实现稳定、低噪声的实时EEG采集,为后续脑机接口算法解码提供高质量神经信号基础。
1. SF-FBCCA算法: 不仅能精准解码用户的控制意图,还能通过“Sigmoid拟合”实时输出指令的后验概率(即意图的可信度)。
2. 自适应MPC权重: 系统根据指令的概率动态调整控制策略。当系统判断用户意图明确(概率高)时,全力执行脑控指令;当判断意图模糊或受噪声干扰时,MPC会自动增加“路径保持”权重,确保系统安全。
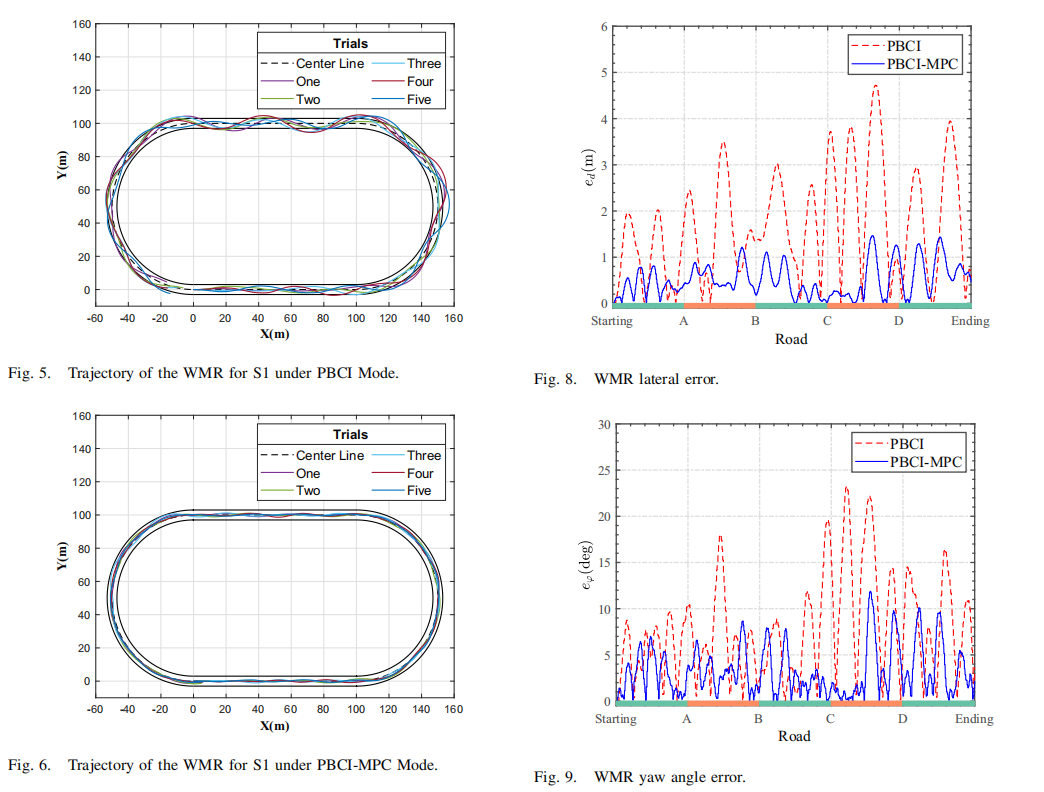
通过在复杂路径保持任务中的模拟评估,该框架展现出了远超传统直接脑控模式的优越性。实验数据显示:
控制精度大幅提升: 相比直接脑控,该框架使机器人的平均横向误差(Average Lateral Error)降低了 58.02%,平均偏航角误差(Average Yaw Angle Error)降低了 60.06%。
任务稳定性更强: 最大横向误差和最大偏航角误差分别降低了 59.68% 和 50.55%。
成功率保障: 在辅助控制器的协作下,任务成功率高达 96.87%。
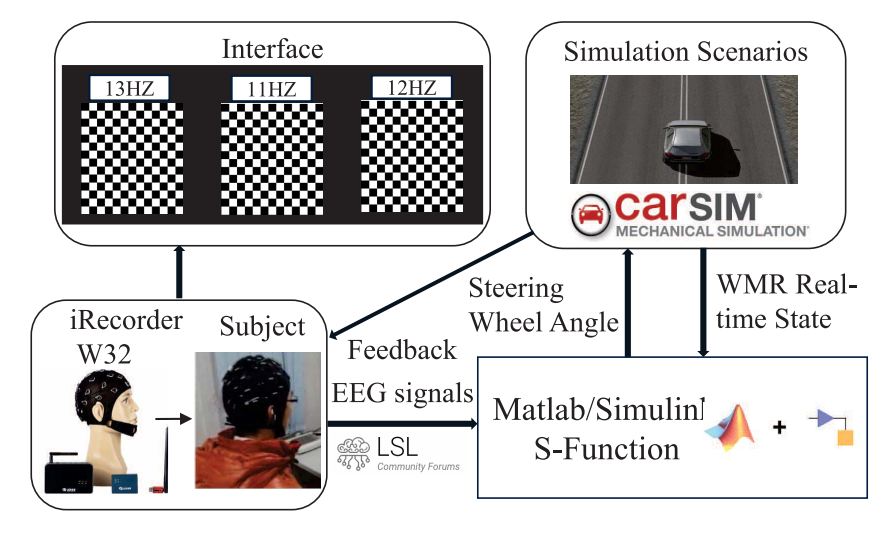
高性能算法的背后,离不开稳定、精准的底层数据。在本研究中,团队选用了念通 iRecorder W32 无线脑电放大器进行 SSVEP 信号采集:
极佳的移动性: 无线连接设计让受试者在进行 11-13 Hz 频率刺激实验时更自然,不受物理线缆束缚。
高采样率与信噪比: 500Hz 的采样率配合 Ag/AgCl 电极,确保了 8 通道(P7, Pz, P8, PO3, PO4, Oz, O1, O2)关键点位信号的纯净度,为 SF-FBCCA 算法提供了高质量的原始数据支持。
02
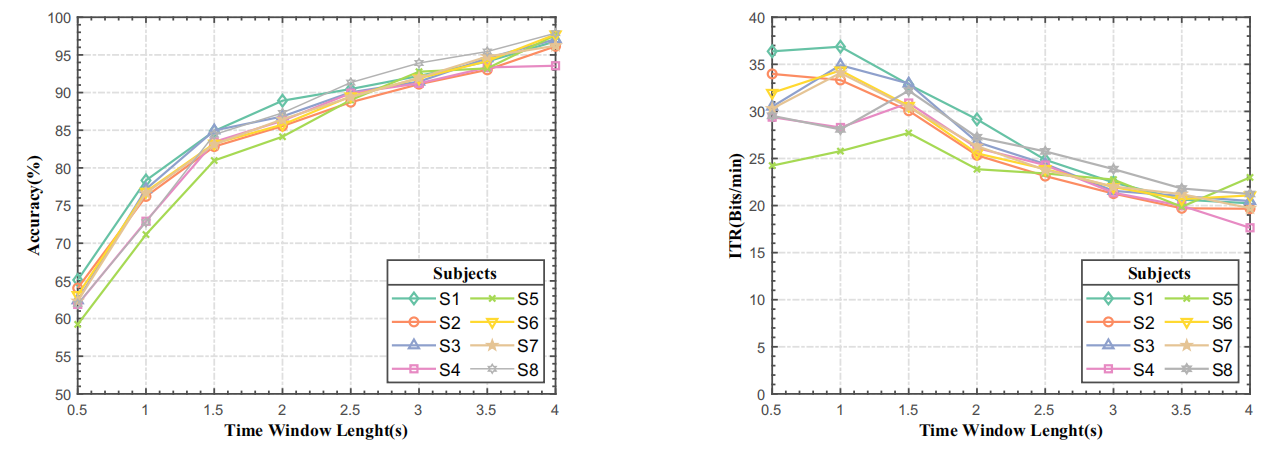
实验结果
03
研究意义
该研究提出的脑控移动机器人框架展示了神经信号解码与智能控制融合的潜力。通过将概率BCI与模型预测控制相结合,系统不仅能够解析用户意图,还能够在复杂环境中提供辅助决策能力,从而显著提升脑控系统的稳定性与效率。
随着高性能脑电采集设备和智能算法的发展,基于脑机接口的机器人控制技术有望在辅助康复、智能轮椅、服务机器人以及人机协同系统等领域发挥更广泛的应用价值。
参考文献
Yu X, Yu X.Brain-Controlled Wheeled Mobile Robots: A Framework Combining Probabilistic Brain–Computer Interface and Model Predictive Control.IEEE Transactions on Cybernetics, 2025.

地址:上海市闵行区剑川路930号B栋3层
电话:021-52630086
手机:15821175342(微信同号)
邮箱:niantong@econtek.cn





